Croatian
Croatian Bulgarian
Bulgarian Chinese (Traditional)
Chinese (Traditional) Arabic
Arabic Sindhi
Sindhi Shona
Shona Scottish Gaelic
Scottish Gaelic Samoan
Samoan Pashto
Pashto Luxembourgish
Luxembourgish Kyrgyz
Kyrgyz Kurdish (Kurmanji)
Kurdish (Kurmanji) Hawaiian
Hawaiian Corsican
Corsican Amharic
Amharic Uzbek
Uzbek Tajik
Tajik Sundanese
Sundanese Sesotho
Sesotho Sinhala
Sinhala Malayalam
Malayalam Malagasy
Malagasy Kazakh
Kazakh Chichewa
Chichewa Myanmar (Burmese)
Myanmar (Burmese) Zulu
Zulu Yoruba
Yoruba Telugu
Telugu Tamil
Tamil Somali
Somali Punjabi
Punjabi Nepali
Nepali Mongolian
Mongolian Marathi
Marathi Maori
Maori Latin
Latin Lao
Lao Khmer
Khmer Kannada
Kannada Javanese
Javanese Igbo
Igbo Hmong
Hmong Hausa
Hausa Esperanto
Esperanto Cebuano
Cebuano Bosnian
Bosnian Bengali
Bengali Urdu
Urdu Haitian Creole
Haitian Creole Georgian
Georgian Basque
Basque Azerbaijani
Azerbaijani Armenian
Armenian Yiddish
Yiddish Macedonian
Macedonian Icelandic
Icelandic Belarusian
Belarusian Welsh
Welsh Irish
Irish Swahili
Swahili Malay
Malay Afrikaans
Afrikaans Persian
Persian Turkish
Turkish Thai
Thai Maltese
Maltese Hungarian
Hungarian Galician
Galician Estonian
Estonian Albanian
Albanian Vietnamese
Vietnamese Ukrainian
Ukrainian Slovenian
Slovenian Slovak
Slovak Serbian
Serbian Lithuanian
Lithuanian Latvian
Latvian Indonesian
Indonesian Hebrew
Hebrew Filipino
Filipino Catalan
Catalan Swedish
Swedish Spanish
Spanish Russian
Russian Romanian
Romanian Portuguese
Portuguese Polish
Polish Norwegian
Norwegian Korean
Korean Japanese
Japanese Italian
Italian Hindi
Hindi Greek
Greek German
German French
French Finnish
Finnish Czech
Czech Danish
Danish Dutch
DutchService hotline
+86 0755-83975897
 en
en 
Release date:2021-12-28Author source:KinghelmViews:2375
Key words: global satellite navigation system; System constellation; Signal system; Coordinate system; System; Service performance
|
Satellite navigation system name |
Navigation satellite parameters of different satellite navigation systems |
|||||||
|
Constellation type |
satellite |
Number of satellites of different types |
Orbital altitude of different types of satellites / km |
Different types of satellites |
Different types of satellites |
Track surface |
Constellation distribution repetition period (times / day) |
|
|
BDS |
The constellation of MEO is walker type 24 / 3 / 1 |
GEO IGSO MEO |
three three twenty-four |
35 786 35 786 21 528 |
— fifty-five fifty-five |
— 23 h 56 min 4 s 12 h 55 min |
— — three |
13/7 (repeated 13 times in 7 days) |
|
GPS |
Non Walker Constellation |
MEO |
twenty-four |
20 200 |
fifty-five |
11 h 58 min |
six |
2/1 (repeat twice a day) |
|
Galileo |
Walker Constellation 24 / 3 / 1 |
MEO |
twenty-four |
23 222 |
fifty-six |
14 h 4 min 45 s |
three |
17/10 (repeated 17 times in 10 days) |
|
GLONASS |
Walker Constellation 24 / 3 / 2 |
MEO |
twenty-four |
19 100 |
sixty-four point eight |
11 h 15 min 44 s |
three |
17/8 (repeated 17 times in 8 days) |
|
System name |
signal |
signal |
Carrier frequency / MHz |
modulation mode |
Information coding method |
Symbol rate in seconds (represented by "number of samples") |
Main valve band |
Broadcast satellite type |
|
BDS |
B1I |
I way |
1 561.098 |
BPSK(2) |
BCH (15,11,1) interleaving |
fifty |
2.046 0 |
GEO/IGSO/MEO |
|
B1C |
B1C_ data |
1 575.420 |
BOC(1,1) |
BCH (21,6) BCH (51,8) 64 base LDPC (200100) 64 base LDPC (88,44) interleaving |
one hundred |
32.736 0 |
IGSO/MEO |
|
|
B1C_ pilot |
QMBOC(6,1,4/33) |
— |
0 |
|||||
|
B2a |
B2a_ data |
1 176.450 |
QPSK(10) |
64 base LDPC (96,48) |
two hundred |
20.460 0 |
IGSO/MEO |
|
|
B2a_ pilot |
— |
0 |
||||||
|
B2b |
I way |
1 207.140 |
QPSK(10) |
64 base LDPC (162,81) |
one thousand |
20.460 0 |
IGSO/MEO |
|
|
B3I |
I way |
1 268.520 |
QPSK(10) |
BCH (15,11,1) interleaving |
fifty |
20.460 0 |
GEO/IGSO/MEO |
|
|
GPS |
L1 |
C/A |
1 575.420 |
BPSK(1) |
Hamming code (32,26) |
fifty |
2.046 0 |
MEO |
|
P(Y) |
BPSK(10) |
encryption |
fifty |
20.460 0 |
||||
|
M |
BOC(10,5) |
encryption |
— |
30.690 0 |
||||
|
L1C |
L1C-D |
1 575.420 |
BOC(1,1) |
Crc-24q BCH (51,8) binary LDPC (1200600) block interleaving |
one hundred |
4.092 0 |
MEO |
|
|
L1C-P |
TMBOC(6,1,4/33) |
— |
— |
14.332 0 |
||||
|
L2 |
P(Y) |
1 227.600 |
BPSK(10) |
encryption |
fifty |
20.460 0 |
MEO |
|
|
C |
BPSK(1) |
Crc-24q convolutional coding (600300) |
fifty |
2.046 0 |
||||
|
M |
BOC(10,5) |
encryption |
— |
30.690 0 |
||||
|
L5 |
L5C |
1 176.450 |
QPSK(10) |
Crc-24q convolutional coding (600300) |
one hundred |
20.460 0 |
MEO |
|
|
L5Q |
encryption |
— |
|
|||||
|
Galileo |
E1 |
E1-A |
1 575.420 |
BOCCOS(15,2.5) |
encryption |
one hundred |
35.805 0 |
MEO |
|
E1-B |
CBOC(6,1,1/11,’ ’) |
Crc-24q convolutional coding (240120) interleaving |
|
4.092 0 |
||||
|
E1-C |
CBOC(6,1,1/11,’ ’) |
— |
|
4.092 0 |
||||
|
E5a |
E5a-I |
1 176.450 |
AltBOC(15,10) |
Crc-24q convolutional coding (488244) interleaving |
fifty |
51.150 0 |
MEO |
|
|
E5b |
E5b-I |
1 207.140 |
Crc-24q convolutional coding (240120) interleaving |
two hundred and fifty |
||||
|
E6 |
E6-A |
1 278.750 |
BOCCOS(10,5) |
encryption |
one hundred |
30.690 0 |
MEO |
|
|
E6-B |
BPSK(5) |
encryption |
one thousand |
10.230 0 |
||||
|
E6-C |
BPSK(5) |
— |
— |
10.230 0 |
||||
|
GLONASS |
G1 |
1 598.0 625~1 605.375 |
BPSK |
Hamming code |
one hundred |
8.334 5 |
MEO |
|
|
G2 |
1 242.9 375~1 248.625 |
BPSK |
Hamming code |
one hundred |
6.709 5 |
|||
|
System name |
Coordinate system name |
Coordinate system parameters |
|||
|
Ellipsoid long radius / M |
Oblateness |
Gravitational constant/ |
Earth rotation velocity/ |
||
|
BDS |
BDCS |
6 378 137.00 |
1/298.257 222 101 |
3.986 004 418 |
7.292 115 |
|
GPS |
WGS84 |
6 378 137.00 |
1/298.257 223 563 |
3.986 004 418 |
7.292 115 |
|
Galileo |
GTRF |
6 378 136.55 |
1/298.257 690 000 |
3.986 004 418 |
7.292 115 146 7 |
|
GLONASS |
PZ90 |
6 378 136.00 |
1/298.257 839 303 |
3.986 004 418 |
7.292 115 |
|
satellite navigation |
Time system parameters of different satellite navigation systems |
|||
|
Time system name |
Starting epoch |
Continuous |
Lag time of Tai / S |
|
|
BDS |
BDT |
2006-01-01 00:00:00(UTC) |
yes |
thirty-three |
|
GPS |
GPST |
1980-01-06 00:00:00(UTC) |
yes |
nineteen |
|
Galileo |
GST |
13 s before August 22, 1999 00:00:00 (UTC) |
yes |
nineteen |
|
GLONASS |
GLONASST |
Lag UTC (Su) 3 h |
no |
Change with leap second |
According to the comparative analysis, the starting epoch of GST is set to 13 s before 1999-08-22t 00:00:00 (UTC) in order to be consistent with GPST. Both GST and GPST lag behind Tai by 19 s.
The conversion relationship between each system is shown in Figure 1.
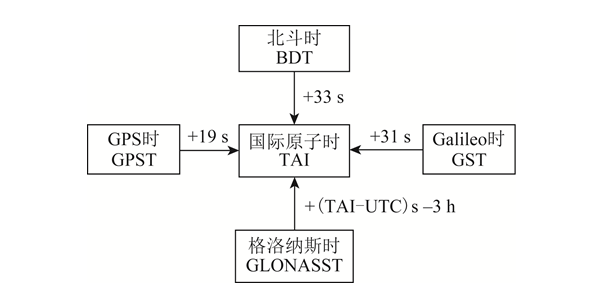
chartone System time conversion relationship
|
System name |
URE/m |
URRE/(m·s-1) |
Positioning accuracy at 95% reliability / M |
Velocity measurement accuracy/ |
At 95% reliability |
|
|
horizontal direction |
Elevation direction |
|||||
|
BDS |
B1C/B2a:0.6(RMS) |
0.006(RMS) |
ten |
ten |
0.2(95 %) |
twenty |
|
B1I/B3I:1(RMS) |
||||||
|
GPS |
The result at 95% reliability is 7.8 |
The result at 95% reliability is 0.006 |
nine |
fifteen |
zero point one |
forty |
|
Galileo |
The result at 95% reliability is 7 |
— |
four |
eight |
— |
thirty |
|
GLONASS |
The result at 95% reliability is 18 |
The result at 95% reliability is 0.02 |
five |
nine |
— |
seven hundred |








Copyright © Shenzhen Kinghelm Electronics Co., Ltd. all rights reservedYue ICP Bei No. 17113853