Service hotline
+86 0755-83975897

Release date:2021-12-28Author source:KinghelmViews:2381
Automatic driving positioning technology is one of the key technologies to realize automatic driving.
Generally speaking, the fundamental problem to be solved by unmanned driving is: where is it now? Where are you going? Which way?
"Where is it now" is the positioning technology we are going to discuss today. Only when an driverless car knows the location of its own car, combined with the surrounding environment information and destination information, can it decide where to go next.
At present, there are no more than three high-precision positioning technologies for automatic driving:
one. positioning based on electronic signals, such as global satellite navigation system GNSS;
two. track estimation, a technology based on IMU inertial measurement unit, which calculates the current position and direction according to the position and direction of the previous time;
threeEnvironmental feature matching, that is, the positioning based on lidar and visual sensor, such as lidar matching, needs to first establish a point cloud map, and then match the real-time data collected by lidar with the point cloud to determine the current position information of the vehicle.
These three methods have their own advantages. Today, let's take a look at GNSS positioning technology.
You may be unfamiliar with GNSS, but you are familiar with GPS or Beidou (BDS).
GNSS (Global Navigation Satellite System) isGlobal navigation satellite system, is a general term, including GPS in the United States, BDS in China, GLONASS in Russia and Galileo in Europe.
The principle is easy to understand, that isThe position of the ground receiver is determined by four satellites with known positions。 We take GPS as an example to explain the principle of satellite positioning.
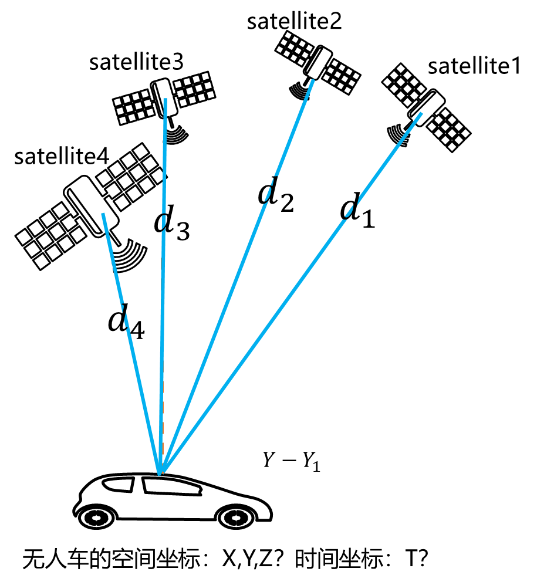
Every GPS satellite running in space is constantly broadcasting its current position and coordinate information to the world through satellite signals. Any GPS receiver can easily receive these information through the antenna and can read these information, that is,The spatial coordinates of the four satellites are known。
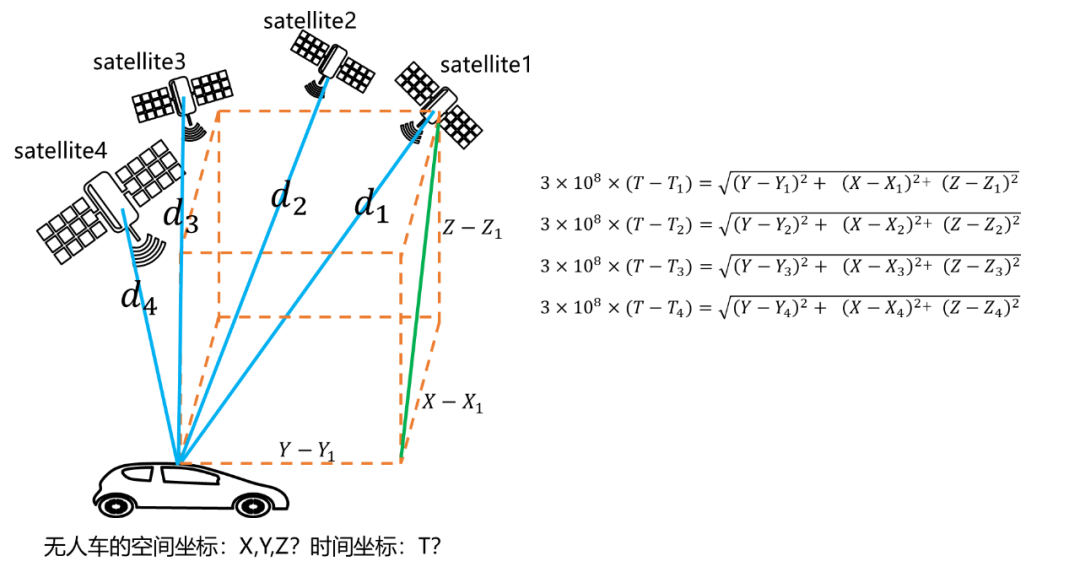
When the satellite sends the location information, it will also attach the time stamp when the data packet is sent. After receiving the data packet, the GPS receiver subtracts the time on the timestamp from the current time (of course, the current time can only be determined by the GPS receiver itself), which is the time used for data packet transmission over the air. The transmission time of the data packet in the air, multiplied by the transmission speed, can get the transmission distance of the data packet in the air, that is, the distance from the satellite to the GPS receiver. That is,The distance from each of the four satellites to the GPS receiver is known。
According to the knowledge of solid geometry, the current position information of GPS receiver can be obtained.
This positioning method is also calledSingle point positioningperhapsAbsolute positioning。
The most difficult problem of GPS positioning is error. There are many reasons for positioning errors, such as ionosphere, receiving equipment, occlusion and multipath effects. Occlusion is the failure to receive satellite signals. Multipath effect is that it can not only receive the signal directly sent by the satellite, but also receive the signal reflected by tall buildings. In this way, the propagation time will be wrong, and then the location of the solution will be wrong.
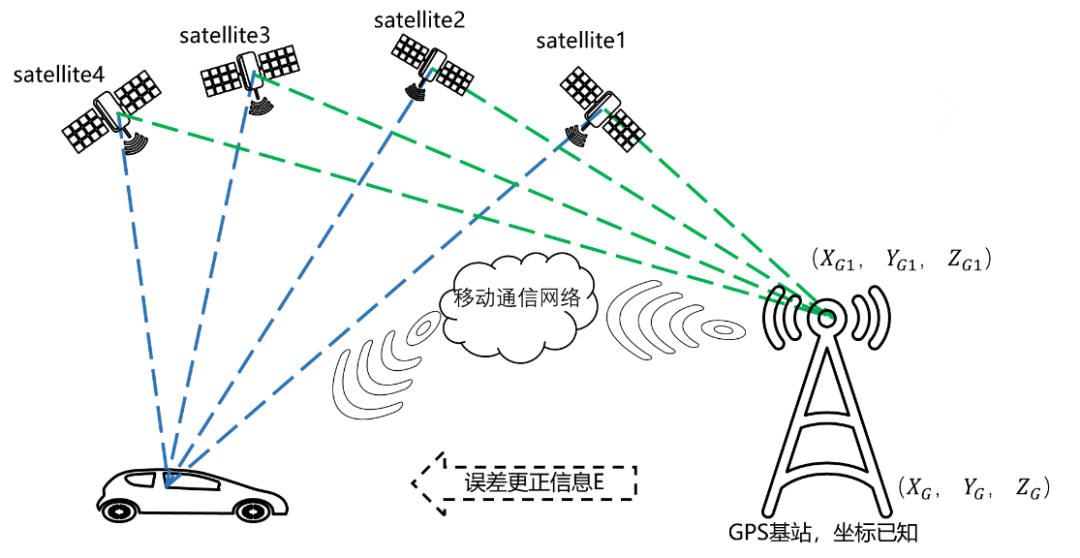
In order to improve the accuracy of GPS positioning and reduce the error, people add a parameter of known coordinatesTest GPS receiver to improve positioning accuracy, which isDifferential positioning, also known asRelative positioning。
A ground-based augmentation system is arranged on the known coordinate points, commonly known as the base station. The base station can also receive the satellite signals, calculate the coordinate values according to these signals, and then compare them with the known coordinates to obtain the deviation. Then, the deviation is sent to the GPS receiver to be located in real time through the data transmission link (the data transmission link is equivalent to the data line, but the data line is wireless) or mobile communication network. The GPS receiver to be located modifies it according to the received information, so as to improve the positioning accuracy.
Real time kinematic (RTK) is a differential method for real-time processing of carrier phase measurements of two stations. In short, it sends the carrier phase collected by the reference station to the receiver of the unmanned vehicle, and the receiver calculates the difference between the carrier phase observations of the local machine and the base station and calculates the coordinates. Generally speaking, most of the errors of the receiver and the base station have time and space correlation, so most of the errors can be offset or reduced. When the two are not far away, the carrier phase difference can make the positioning accuracy reach the centimeter level.








Copyright © Shenzhen Kinghelm Electronics Co., Ltd. all rights reservedYue ICP Bei No. 17113853